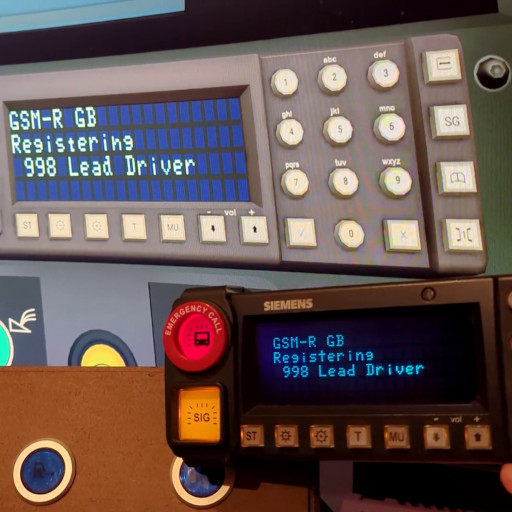
GSM-R is the latest secure way for UK train drivers to communicate with signallers (dispatchers) and other drivers. Modern UK trains have a Driver’s Control Panel (DCP) with a display and buttons, but to date, very few simulator builders have succeeded at integrating a functional GSM-R DCP into their simulators. Here’s how I managed it.