MiNT (Mobile Network Testbed)
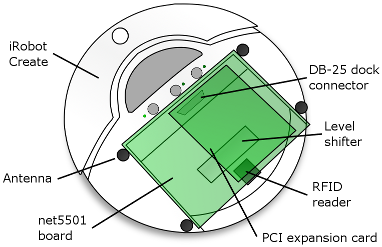
The objective of this project was to continue previous work by SUNY Stony Brook to create a physical, small-scale test environment to simulate wireless network scenarios. A tool called Network Simulator (NS2) existed, but since it performed all simulation solely in software, it cannot accurately reproduce all of the possibly fault modes possible in a real wireless situation, including multipath interference, obstacles, and hardware failure. I designed a hardware platform upon which to implement a hybrid NS2 using commercial iRobot Create robots and x86-based embedded computers with multiple wireless interfaces, then helped to build the hybridized NS2 software. Among the challenges we encountered were the problem of correcting for inaccuracies in the robots’ movements (localization), finding hardware drawing sufficiently low power to run entirely off the robot’s own battery to simplify the design, and properly controlling the transmission power level of each robot to maintain the small-scale quality of the testbed.
Full documentation of MiNT results to date can be found in the Published Works section of the Publications page here.